In rpact version 3.3, the delayed response group sequential methodology from Hampson & Jennison (2013) is implemented. Further work, e.g., by Whitehead (1992), Faldum & Hommel (2007), Schüürhuis (2022)
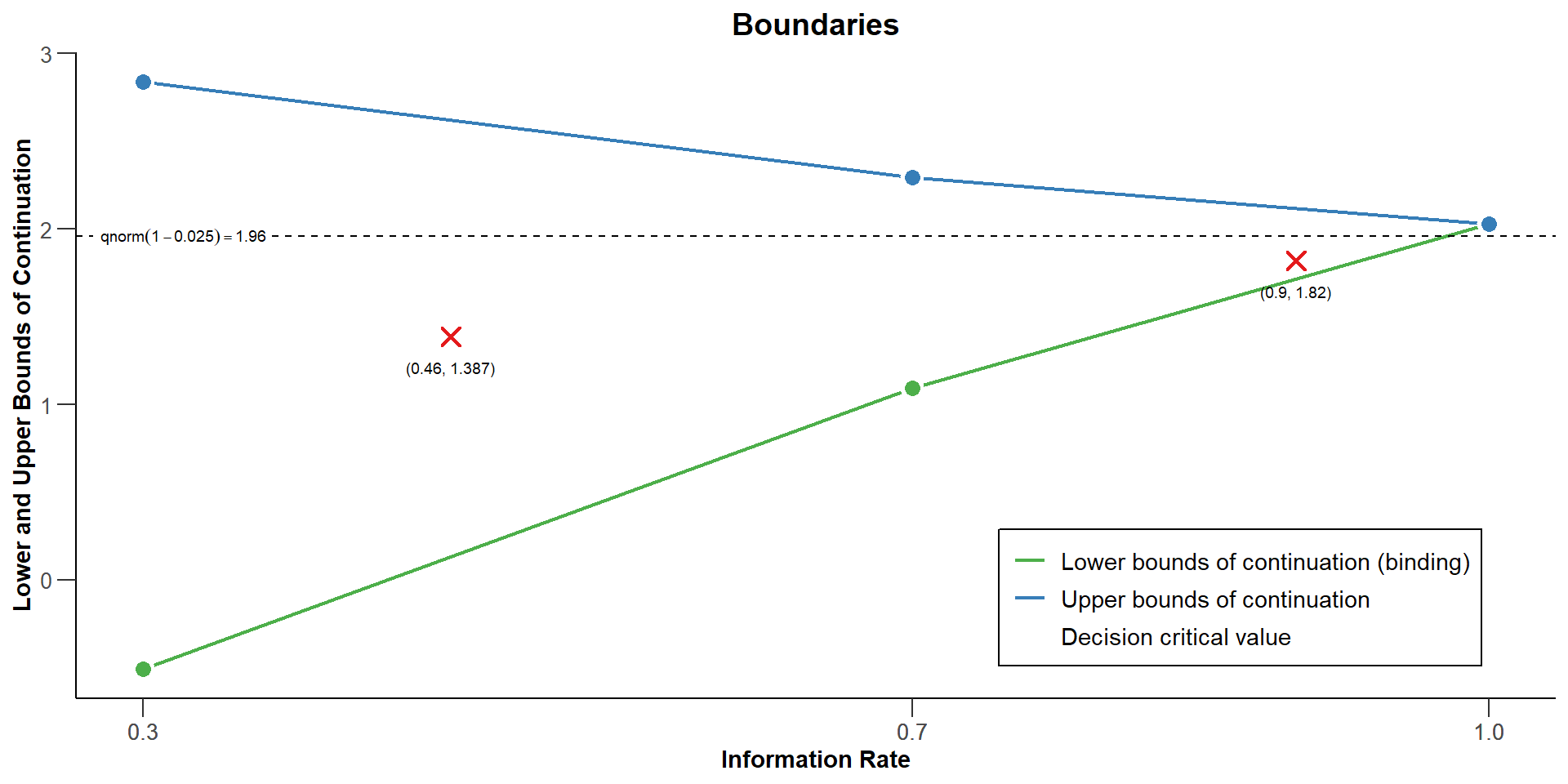
Main task was to write a function returning the decision critical values according to the calculation rules in Hampson & Jennison (2013)
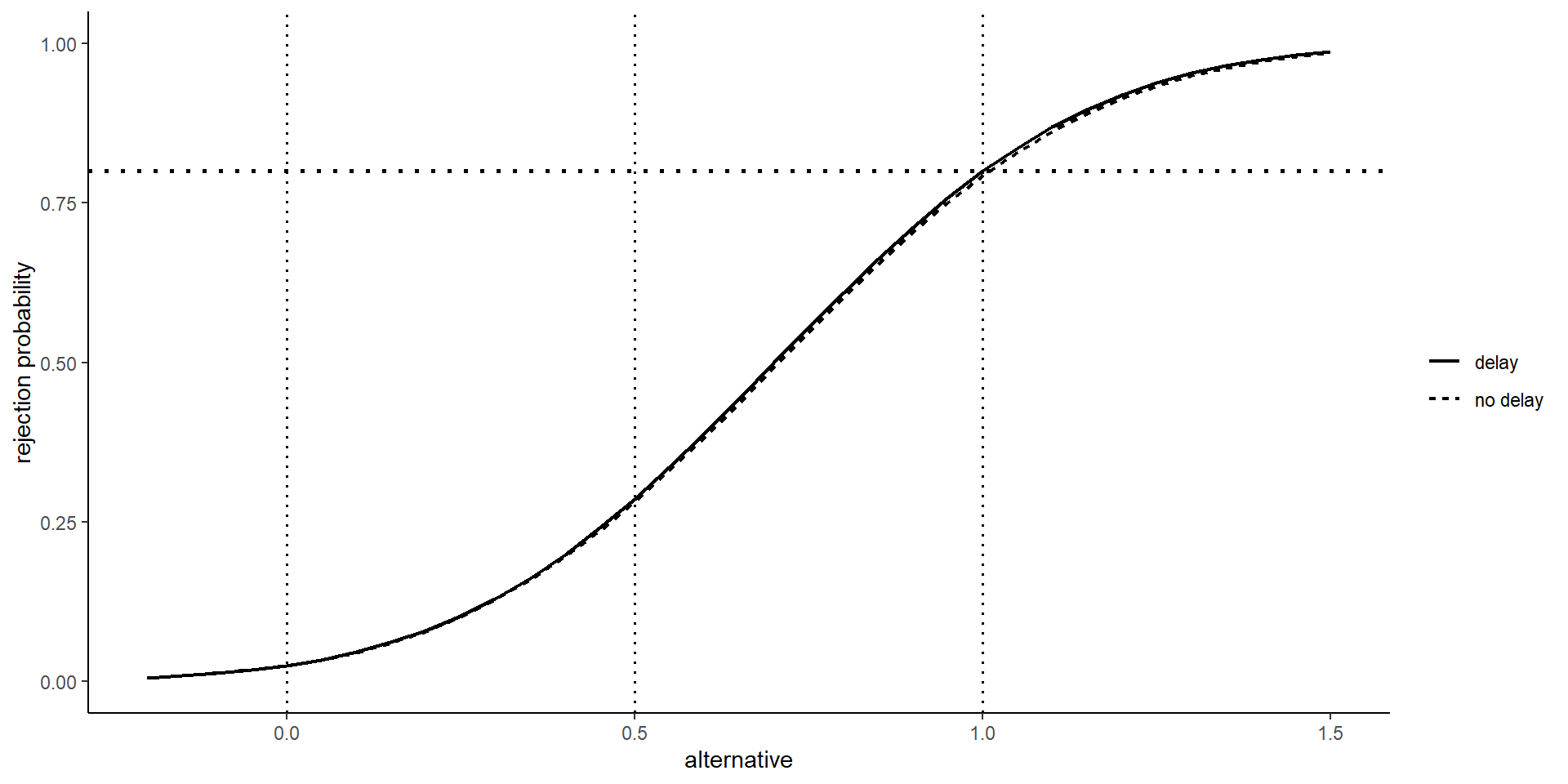
Functions characterizing a delayed response group sequential test given certain input parameters in terms of power, maximum sample size and expected sample size have been written
These functions were integrated in getDesignGroupSequential(), getDesignCharacteristics(), and the corresponding getSampleSizexxx() and getPowerxxx() functions
Other approaches can conveniently be handled with the newly published function getGroupSequentialProbabilities().
Methodology of Delayed Response Designs
Consider function getGroupSequentialProbabilities() which provides precentiles within a group sequential design (Armitage & McPherson algorithm):
Example Type I error rate when using the unadjusted critical value in a two-sided design
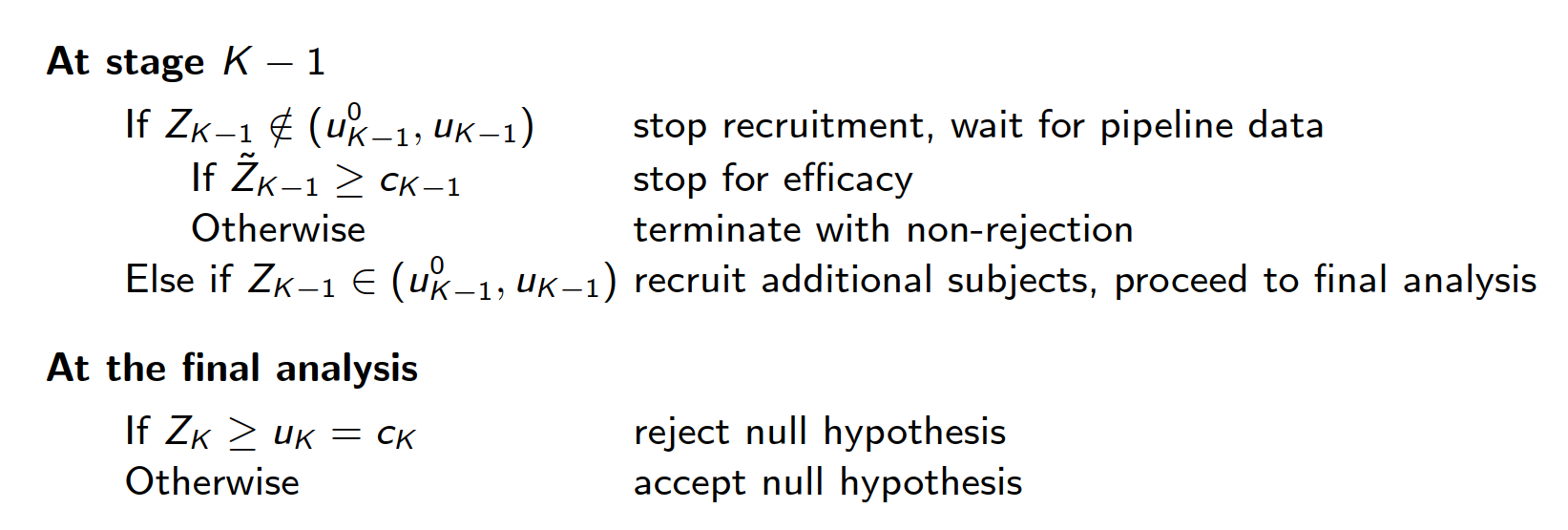
Given boundary sets \(\{u^0_1,\dots,u^0_{K-1}\}\), \(\{u_1,\dots,u_K\}\) and \(\{c_1,\dots,c_K\}\), a \(K\)-stage delayed response group sequential design has the following structure:
According to Hampson & Jennison (2013), the boundaries \(\{c_1, \dots, c_K\}\) with \(c_K = u_K\) are chosen such that “reversal probabilities” are balanced. More precisely, \(c_1,\ldots,c_{K - 1}\) are chosen as the (unique) solution of:
Further calculations (e.g., futility bounds and power/sample size calculation for this approach) can be found in Vignette “Delayed Response Designs” that is available on CRAN.
Summary
There are different ways to handle a group sequential design with delayed responses
So far, we have implemented the approach proposed by Hampson & Jennison (2013) that is based on reversal probabilities.
The direct usage of the delayed information within the design definition make it easy for the user to apply these designs to commonly used trials with continuous, binary, and time to event endpoints.
Use of the getGroupSequentialProbabilities() function allows to derive the critical values and the test characteristics for the alternative approach that “more directly” determines the critical values through a spending function approach.